Practical Introduction to Neural Networks¶
Fundamentals¶
Neural Networks (NNs), including Convolutional Neural Networks (CNNs) as a
special case, are a class of non-linear, parametrised functions mapping
 - seen from very narrow point of
view assumed for the sake of this practical tutorial. For a more comprehensive
description refer to
- seen from very narrow point of
view assumed for the sake of this practical tutorial. For a more comprehensive
description refer to
- Marius’ Introduction to Artificial Neural Networks [pdf] (more concise).
- http://neuralnetworksanddeeplearning.com (more detailed and slower-paced)
NNs are typically models for supervised training (excluding auto encoders, which can be used for unsupervised tasks). This means the user must provide input examples and corresponding desired outputs, called labels. Together they form a training set. The deviation between current output and desired output is called loss. The parameters of the NN (also called synaptic weights) are optimised by gradient descent techniques in order to minimise the loss. Provided the training has been successful in minimising the training loss and the training examples cover a representative variety of input data, the NN will generalise i.e. it is able to produce good output predictions for unseen input data. The loss (or classification accuracy) should be evaluated on a hold out validation data set to give an estimate of the generalisation capability and to detect over-fitting.
NNs can outperform many other models but they are rather difficult to handle. In particular they demand many training examples and precise labels with little noise. Furthermore they might require a high number of trial runs with different architectures and meta-parameters until a good model is found. The reward is the prospect of state-of-the-art results that often outperform other methods.
Operation Modes in ELEKTRONN2¶
Generally there are three modes of training set ups, supported by the built-in pipeline:
img-img: Input data and output data are image-like (i.e. there exists neighbourhood relations between adjacent elements (pixels) in the data arrays. This property is irrespective of dimensionality and can also be seen as neighbourhoods of temporal nature). E.g. for neuron membrane segmentation the inputs are 3D EM-images and the labels images too, that have
1for pixels in which a membrane is present and0for background.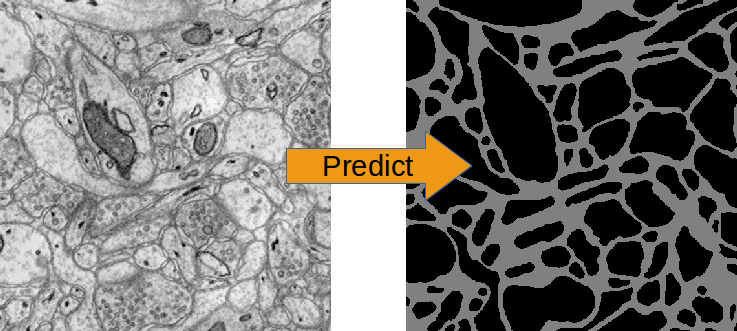
EM-Images and derived membrane labels from the ISBI 3D data set (the original labels contained neurite IDs and not neurite boundaries)
img-scalar: The input data is image like, but the labels correspond to the image as a whole - not to individual pixels/locations. E.g. “this image shows a cat” or “this is an image of digit 3”.
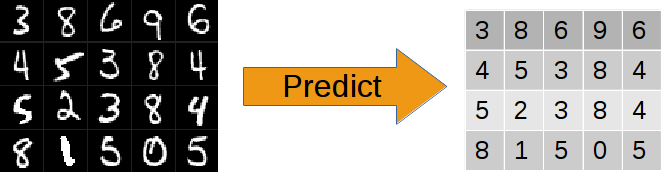
20 instances form the MNIST data set and their target labels.
vect-scalar: The input data is a vector of arbitrary features (i.e. there exists no relation between adjacent elements). Common examples of vector data are word counts in a document or demographic properties of persons as in the depicted example:
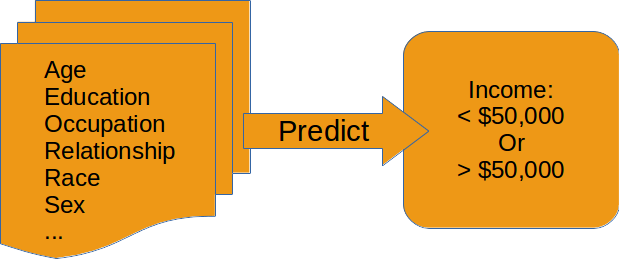
Exemplary features of the “Adult” data set and the (binary) prediction target.
Convolutions are only applicable for the first and second mode. Note that a neighbourhood relation can also be temporal e.g. a z-stack of 2D images (x,y-axes) from a video sequence: the images are ordered by time and a 3D convolution becomes a spatio-temporal filter.
Data Considerations¶
Preprocessing¶
Training convergence is usually improved a lot by scaling the input data properly. However, there is no single way to do this. Common methods are:
- Normalisation: scale range to
(0,1) - Standardisation: subtract mean and scale variance to 1 (where the mean and variances can be computed per pixel, per feature or over all inputs)
- Whitening: like standardisation but including de-correlation of all features
For images, normalisation to (0,1) usually works well and is most
convenient - images stored as uint8 (grayscale 0-255) are converted to
float and normalised to (0,1) automatically by ELEKTRONN2’s pipeline.
Label Quality¶
Training data must in general be densely labelled i.e. for each pixel of a raw image the corresponding pixel in the label image must contain the class index (or a float value for regression). In particular for object detection/classification this means all pixels of that object must carry the index of the class to which the object belongs. E.g. if the task is to detect cats, dogs and birds (their position in an image), every pixel of an animal’s silhouette must carry the corresponding class index in the label image. Noise in these annotations is bad (e.g. the labelled area is smaller or larger than the real object extent, the contours do not match). We found that CNNs can tolerate label noise well if there is a large number of training examples, which essentially average out the noise during the training.
The above does not apply to img-scalar training, since spatial relations are not considered.
Label Coverage¶
A CNN can only generalise well if the training data covers a great range/variety of possible inputs.
If you generate ground truth, be aware of the CNN offsets: To make a CNN train at a specific location, an image patch around the location (“context”) must be provided as input. So if you have images of a certain size, you cannot make predictions or do training for the pixels which lie in a stripe close to the border. The thickness of this stripe is determined by the offsets, which in turn are determined by the size of the convolution filters. Never label data for in the border stripes in which you cannot make predictions, this is a waste of resources.
Network Architecture¶
When defining an architecture, several things should be considered:
Note
It should be kept in mind that all training sets and training goals are different and the above instructions are just meant as a general guide. Various architecture versions should be tested against each other to find out what works well for a particular task.
Convolutional Networks¶
- Filter sizes:
- Larger filters increase the field of view.
- Larger filters are slower to compute but do not require significantly more GPU memory.
- Larger filters introduce more model parameters, but as the number of filters that can be used is limited by speed or GPU memory, the greater “expressiveness” of larger filters might actually not be utilised and smaller filters could be equally good while also being faster.
- In the very first layer the filter size must be even if pooling by factor 2 is used. Otherwise output neurons lie “between” input pixels.
- Filter sizes and pooling factors can defined separately for each dimension.
This is useful if 3D data has anisotropic resolution or just “a little”
information in the z-direction is needed. A useful and fast compromise
between a plain 3D and 2D network is a CNN that has e.g. filter shape
(1,4,4)in the first layers and later(2,2,2): this means the first part is basically a stack of parallel 2D CNNs which are later concatenated to a 3D CNN. Such “flat” 3D CNNs are faster than their isotropic counterparts. An implementation of this technique can be found in the “3D Neuro Data” example. - The last layers may have filter sizes
(1,1,1), which means no convolution in any dimension and is equivalent to a stack of parallel fully connected layers (where the number of filters corresponds to the neuron count).
- Number of Filters:
- Due to larger feature map sizes in the first layers (before pooling), fewer filters can be used than in later layers.
- A large number of filters in later layers may be cheap to compute for training as the feature map sizes are small but predictions still become expensive then.
- Still it is advisable to have a tendency of increasing filter size for later layers. This can be motivated from the view that early layers extract primitives (such as edges) and the number of relevant primitives is rather small compared to the number of relevant combinations of such primitives.
- Max-Pooling:
- Reduces the feature map size of that layer, so subsequent layers are cheaper to compute.
- Adds some translational invariance (e.g. it does not matter if an edge-pattern is a little bit more right or left). This is good to some extent, but too many consecutive poolings will reduce localisation.
- Increases the field of view of a single output neuron.
- Results in strided output/predictions due to the down-sampling. “Strided” means the neurons after pooling correspond (spatially) to every second input neuron. By applying successive poolings this becomes every fourth, eight and so on, the “stepsize” is called stride. Per layer for a given number of input neurons the number of output neurons is reduced by the pooling factor, this is important because too few output neurons give noisier gradients and the training progress might be slower. Another effect is that poolings make prediction more expensive, because the pixels “between the stride” must be predicted in another forward-pass through the CNN. The simple and slow way is iterating over all positions between the strides and accumulating the strided predictions to a dense image. The fast (and computationally optimal) way is to activate Max Fragment Pooling (MFP), which gives dense images directly but requires a lot of GPU memory.
- The final strides in each dimension is the product of pooling factors in
each dimension (e.g.
2**4 = 16), the number of total prediction positions (or fragments for MFP) is the product of all pooling factors: in 3D, 4 poolings with factor 2 in all dimensions gives the astonishing number of 4096! As mentioned for the filter sizes below, it is possible to create “flat” 3D CNNs that avoid this, by applying the pooling only inxandy, notzwith pooling factors written as(1,2,2). - It is recommended to use only poolings in the first layers and not more than in 4 layers in total. The value of the pooling factor should be 2.
Note
To get centered field of views (this means label pixels are aligned with output neurons and do not lie “in between”) when using pooling factors of 2, the filter size in the first layer must be even. This is at first counter-intuitive because for an even-sized filter there is no “central” pixel, but if followed by a pooling with factor 2, this results in a centered output in total.
Multi Layer Perceptron (MLP)¶
Perceptron layers
are only needed for img-scalar training.
The image-like feature maps of the last convolutional layer are flattened to a
vector and given as input to the perceptron layer; thus one or more perceptron
layers can be attached. If the image-like extent of the last convolutional
layer is large and/or the layer has many filters the flattened vector might be
quite large. It is therefore advisable to reduce the image extent by using
maxpooling in the layers to a small extent, e.g. 2 x 2 (x 2).
The convolutional part of the network can be interpreted as a feature extractor and perceptron layers as a classificator, but in fact this is rather a continuous transition. Each Perceptron layer is characterised by the number of (output) neurons.
Note
Always check the CNN architecture before starting a training by using the
cnncalculator()
function. Only the input shapes listed in the attribute valid_inputs
can be used. This is also applicable for img-scalar training, because
for pooling by factor 2, the layers must have even sizes; if the desired
architecture is not possible for the size of the images, the images must be
constant-padded/cropped to change their size or the architecture must be
changed.
Tweaks¶
A number of helpful CNN/NN tweaks is supported by ELEKETRONN2 and presented in this section.
Class weights¶
Often data sets are unbalanced (e.g. there are more background pixels than object pixels, or much more people earning less than 50 000 $). In such cases the classifier might get stuck predicting the most frequent class with high probability and assigning little probability to the remaining classes - but not actually learning the discrimination. Using class weights, the training errors (i.e. incentives) can be changed to give the less frequent classes greater importance. This prevents the mentioned problem.
class_weights can be specified when initializing loss nodes, e.g.:
loss = neuromancer.MultinoulliNLL(probs, target, class_weights=[0.5, 2.0])
will weigh class 0 much less than class 1 (given there are two classes).
Data Augmentation, Warping¶
CNNs are well-performing classifiers, but require a lot of data examples to generalise well. A method to supply this demand is data augmentation: from the limited given data set (potentially infinitely) many examples are created by applying transforms under which the labels are expected to be constant. This is especially well suited for images. In almost all cases small translations and changes in brightness and contrast leave the overall content intact. In many cases rotations, mirroring, little scaling and minor warping deformations are possible, too.
For img-img training the labels are subjected to the geometric transformations jointly with the images (preserving the spatial correspondence). By applying the transformations with randomly drawn parameters the training set becomes arbitrarily large. But it should be noted that the augmented training inputs are highly correlated compared to genuinely new data. It should furthermore be noted, that the warping deformations require on average greater patch sizes (see black regions in image below) and thus the border regions are exposed to the classifier less frequently. This can be mitigated by applying the warps only to a fraction of the examples.
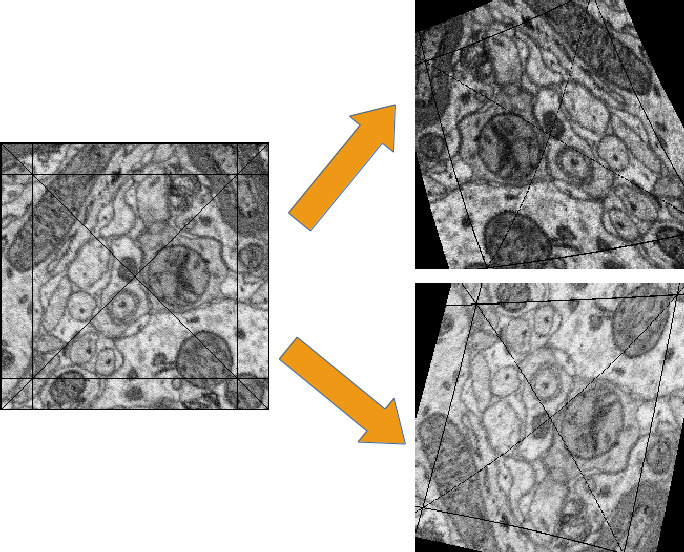
Two exemplary results of random rotation, flipping, deformation and historgram augmentation. The black regions are only shown for illustration here, internally the data pipeline calculates the required input patch (larger than the CNN input size) such that if cropped to the CNN input size, after the transformation, no missing pixels remain. The labels would be transformed in the same way but are not shown here.
Warping and general augmentations can be enabled and configured in the data_batch_args section of a config file.
Dropout¶
Dropout is a major regularisation technique for Neural Networks that improves generalisation. When using dropout for training, a fraction of neurons are turned off - but randomly, changing at every training iteration step.
This can be interpreted as training an ensemble of networks (in which the members share common weights) and sampling members randomly every training step. To make a prediction the ensemble average is used, which can be approximated by turning all neurons on i.e. setting the dropout rate to 0 (because then the sum of incoming activations at a neuron is larger, the weights are rescaled automatically when changing the rate).
Training with dropout requires more neurons per layer (i.e. more filters for CNNs), larger training times and larger learning rates. We recommend to first narrow down a useful architecture without dropout and from that point start experimenting with dropout.
Dropout rates can be specified by the dropout_rate argument when
initializing Perceptrons
and any nodes that inherit from it (e.g.
Conv). For example, to make a
Conv node use a 30% dropout rate, you initialize it with:
out = neuromancer.Conv(out, 200, (1,4,4), (1,1,1), dropout_rate=0.3)
(Compare this line with the 3D CNN example, which doesn’t use dropout.)
Input Noise¶
This source of randomisation adds Gaussian noise to the input of a layer (e.g. in the central layer of an auto encoder). Thereby the NN is forced to be invariant and robust against small differences in the input and to generalise better. Input noise is somewhat similar to drop out, but contrast drop out sets certain inputs to 0 randomly.
This feature is provided by the
GaussianRV layer.
Training / Optimisation¶
Because of the non-linear activation functions, the loss function of a NN is a highly non-convex function of its weights. Analytic solutions do not exist, so we optimize using gradient descent techniques with various heuristics. Convergence is a user-defined state, either determined by good enough results (no progress possible any more) or by the point where the loss on a held out validation set begins to increase, while the loss on the training set still decreases - continuing training in this situation inevitably leads to over-fitting and bad generalisation.
Optimisers¶
Stochastic Gradient Descent (SGD)¶
This is the basic principle behind all other optimisers. SGD is the most common optimisation scheme and works in most cases. One advantage of SGD is that it works well with only one example per batch.
- In every iteration:
- From the training data one or several examples are drawn. The number of drawn examples is called batch size.
- The output of the NN, given the current weights, is calculated
- The gradient of the loss (deviation between output and desired output) is calculated w.r.t. the weights
- The weights are updated by following down the gradient for a fixed step size - the learning rate
- The whole procedure is repeated with a new batch until convergence
The learning rate is usually decreased by schedule over the time of the training (see schedules).
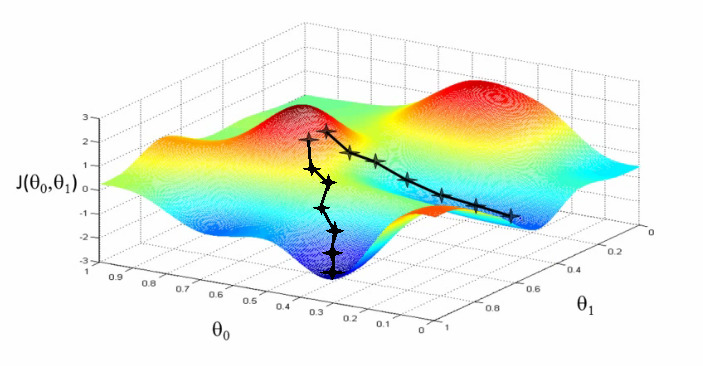
Illustration of gradient descent on a 2D error surface. This corresponds to a model with just two parameters. As can be seen, the outcome depends on the starting point (a.k.a. weight initialisation) and may lead to different local optima. For more dimensions the problem of multiple local optima is even more severe. If you train a network twice under same conditions except for the random weight initialisation and the random batch shuffling, you will almost definitely end up in completely different local optima. But empirically the performance is pretty close. In practice, another difficulty is more relevant: saddle-points which may ill-condition the training. [image source]
Adam¶
The Adam optimiser is explained in detail here: https://arxiv.org/abs/1412.6980v9.
We recommend starting training with Adam (especially if you are not sure about your hyperparameter choices, because it is relatively robust).
Optimiser hyperparameters¶
Learning rate¶
The learning rate should be as large as possible at the beginning of the training and decrease gradually or in steps (optimally always after the loss has plateaued for some time). “As large as possible” here means the following: since the gradient is only a linear approximation, the loss decreases only along a small step size on the gradient and goes up again for larger steps (very quickly). Thus by setting a fixed learning rate, some update steps may in fact lead to an increase of the loss if they are too large. The learning rate should be so large that most of the updates decrease the loss but large enough that a few steps lead to increases - because then you know that a greater learning rate would not be possible. The training pipeline creates a plot with the per-step changes of the loss.
The learning rate depends on the NN architecture and the batch size:
- Deeper nets commonly require smaller learning rates.
- Larger batches can go with larger learning rates (there is less noise in the gradients).
Momentum¶
Momentum replaces the true gradient by an exponential moving average over the previous gradients. This can speed up progress by accumulation of gradients and prevent over-fitting to only the current example by averaging over other examples. Momentum is parametrised by a meta-parameter that determines the mixing rate of the previous gradients and the current gradient. In the picture of the error surface it can be visualised by a massive ball rolling down the hill which, through its mass, can accumulate speed/momentum and also go upwards shortly - across a small ridge for example.
Momentum should be raised towards the end of the training but it can also be kept constant.
A very well written in-depth explanation of momentum can be found in the article Why Momentum Really Works.
Weight Decay¶
Weight decay is synonymous with a L2 penalty on the weights. This means additional to the loss that comes from the deviation between current output and desired output, large weight values are regarded as loss - the weights are driven to have smaller magnitudes while at the same time being able to produce good output. This acts as a regulariser (see Tikhonov Regularisation).
More about weight decay can be found in this paper.
You can specify weight decay in the wd entry of the
optimiser_params inside a config.